解决方案-车路协同V2X-AVP及室内导航
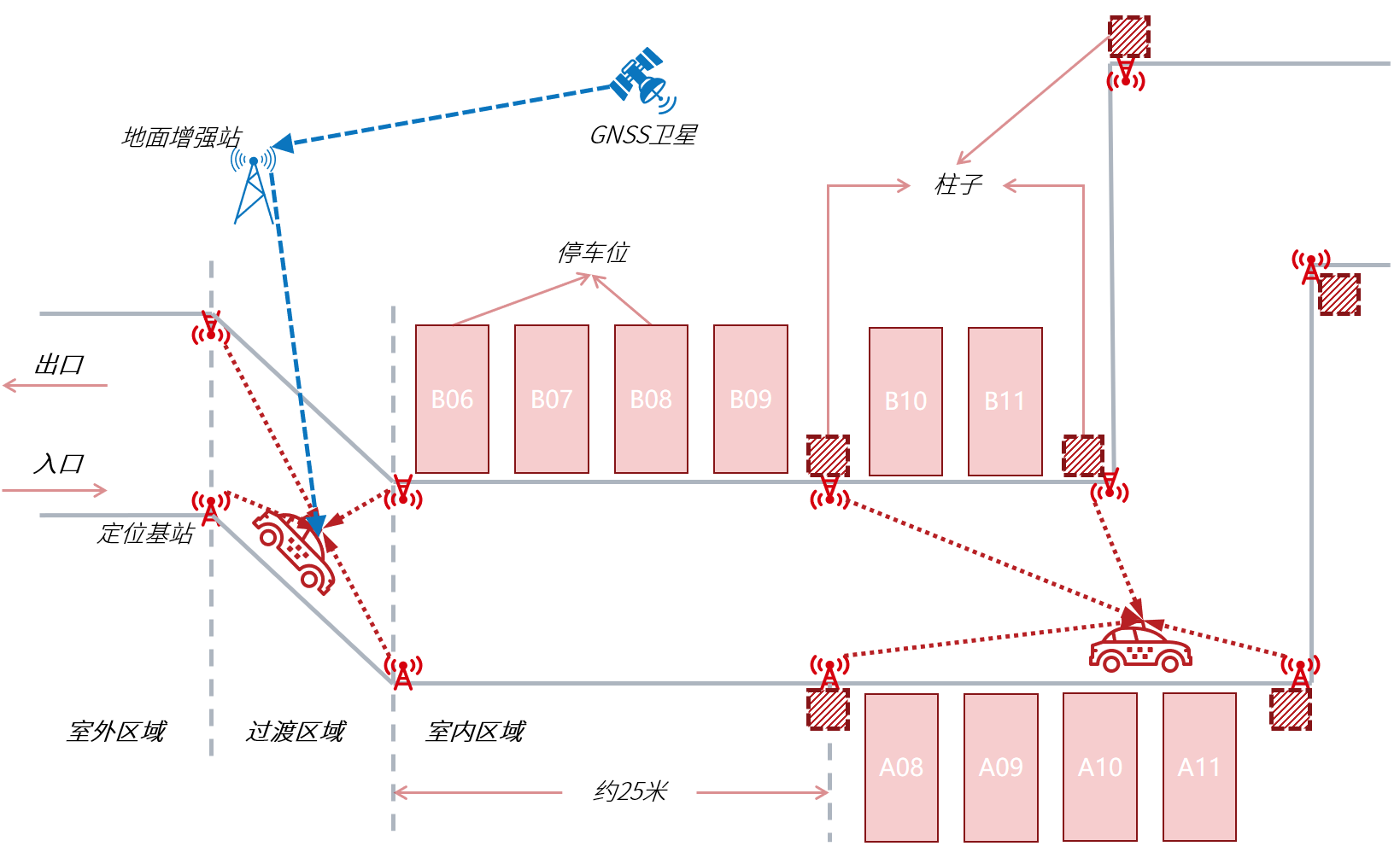
本方案默认仅覆盖停车场内道路。车辆行驶到目标停车位时,可使用成熟的APA技术泊入车位。
如有特定需求,可将覆盖范围拓展至车位,成本会相应增加。
对GNSS/RTK信号良好的区域,无需铺设基站。在接近停车场的入口和出口处,视应用场景需求,需铺设50-100米的过度区域。
KC-BOX设备支持进行配置,可输出融合后的融合定位数据,亦可配置成同时输出GNSS、UWB的数据,具备较高的自由度。
